組立を開始する前に、この説明書を最後までお読みになって、組立と調整の手順を理解していただくようお願いいたします。
1. 部品リスト
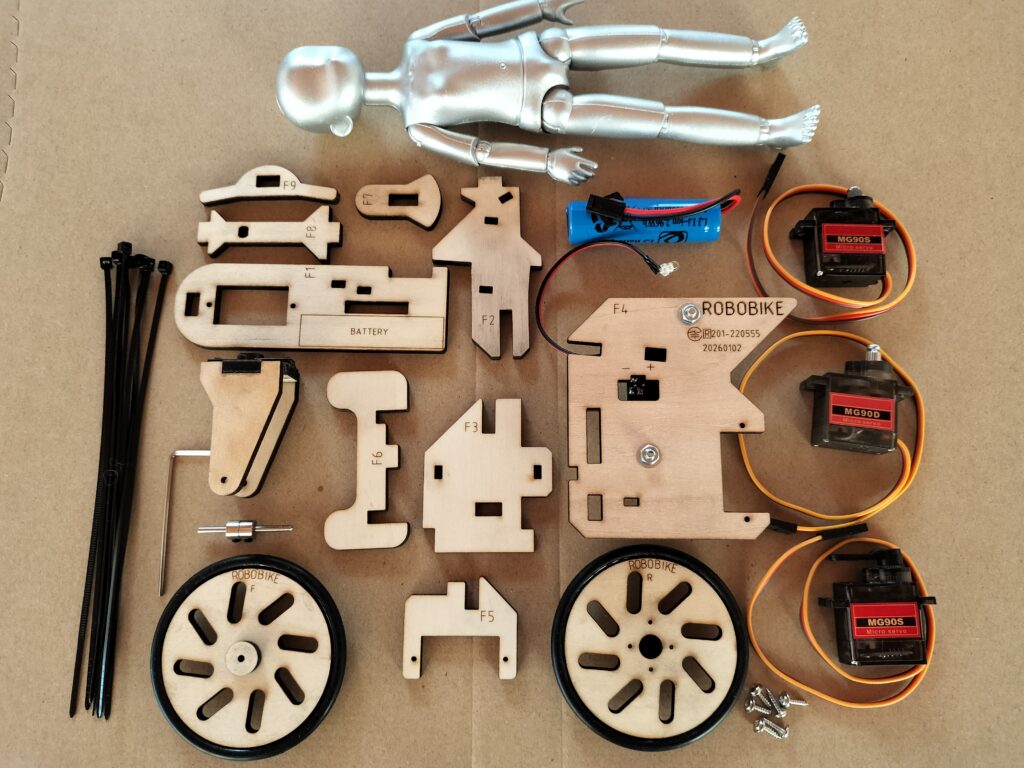
組立の前に、部品がすべてそろっていることを確認してください。
| 名称 | 数量 | 備考 |
| フレーム 1~9 | 1式 | シナベニヤ |
| 前輪 | 1 | ゴムタイヤ取付済 |
| 後輪 | 1 | ゴムタイヤ、サーボホーン取付済 |
| プリント基板 | 1 | 前照灯LED付き、フレームに取り付け済 |
| ドライブモーターサーボ | 1 | 連続回転型(360°) MG90D |
| ステアリングサーボ | 1 | 通常型(180°) MG90S |
| サイドスタンドサーボ | 1 | 通常型(180°) MG90S サーボホーン取付済 |
| バッテリー | 1 | 800mAh 14500 |
| ロボット人形 | 1 | シルバー塗装 |
| 結束バンド 2X150mm | 8 | 予備を含む |
| ビス M3X12 | 2 | 基板に取付済 |
| ナット M3 | 4 | 基板に取付済 |
| ワッシャ M3 | 4 | 基板に取付済 |
| 車軸 Φ2.0 | 1 | L=29mm |
| ホイールストッパー Φ2.0 | 2 | イモネジ付き |
| タッピングビス 2X8 | 6 | サーボ取付用 |
| ビス M2.5X4 | 2 | サーボホーン取付用 |
| 対辺1.5 L型6角レンチ | 1 | イモネジ締め付け用 |
・前輪、車軸、ホイルストッパー、フロントフォークは仮組されていますが、このままではステアリングサーボにフロントフォークを取り付けるビスを締めることができません。組立の前にホイルストッパーを外して車軸を抜いてください。
・フレームはレーザーカットされているため、切断面には炭化した黒い粉末が付着しています。手や衣服の汚れにご注意ください。
2. フレームの組み立て
フレームの各部品にはF1からF9まで番号が記入されており、番号順にスリットを組合せて組み立ててください。
接着の前に、部品同士がスリットの奥に当たるまで差し込まれているかを慎重に確かめてください。
すべてのフレーム部品を組み立てたら、スリットの差し込み部が奥まできちんと入っているのを確かめてください。
スリットのかみ合わせがOKであれば、すべての交差部分の隅に低粘度または中粘度の瞬間接着剤を少量づつ付け、すき間に浸みこませて固定します。



ここまで組み上げたら接着剤を流して固定
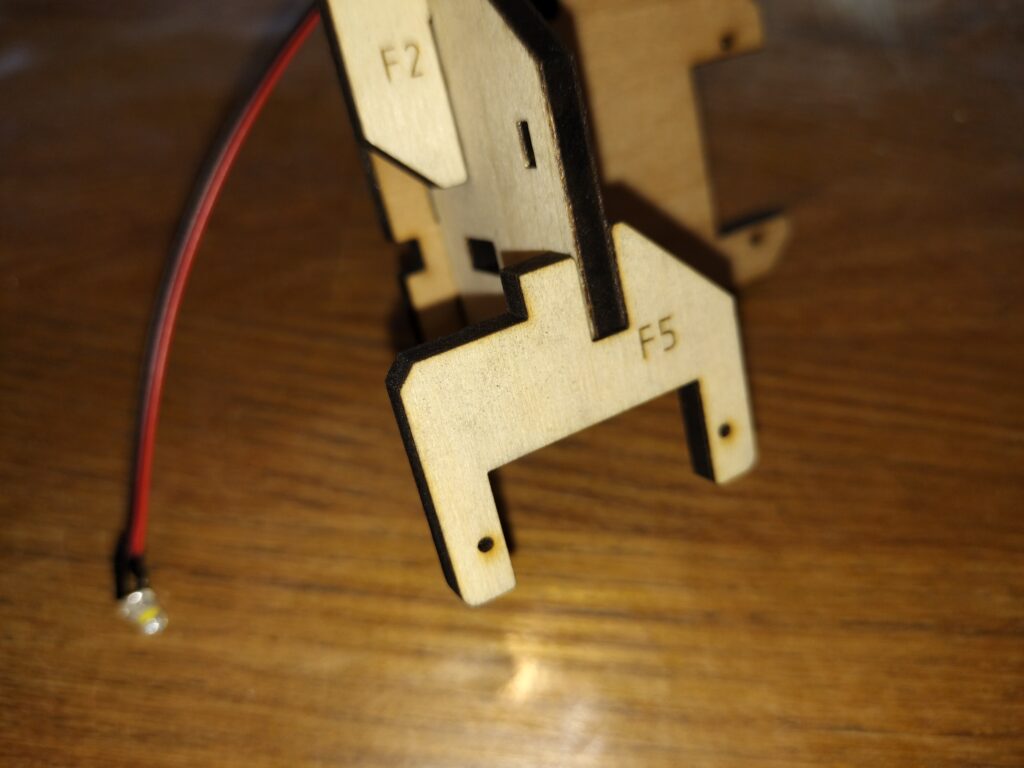
3. サーボの取り付け
サーボマウントF5に、サイドスタンドサーボを取り付けます。写真のように車体左から挿入し、軸が前方になる向きに取り付けてください。サーボホーン(スタンドアームとして利用)は取り付け済みなので、外さずにそのまま使用してください。サーボの取り付けには「木ねじ(タッピングビス)2X8 2本」を使用します。
他のサーボの取り付けも同じ木ねじを使います。
ステアリングサーボ(MG90S)をF1の上から挿入して取り付けます。

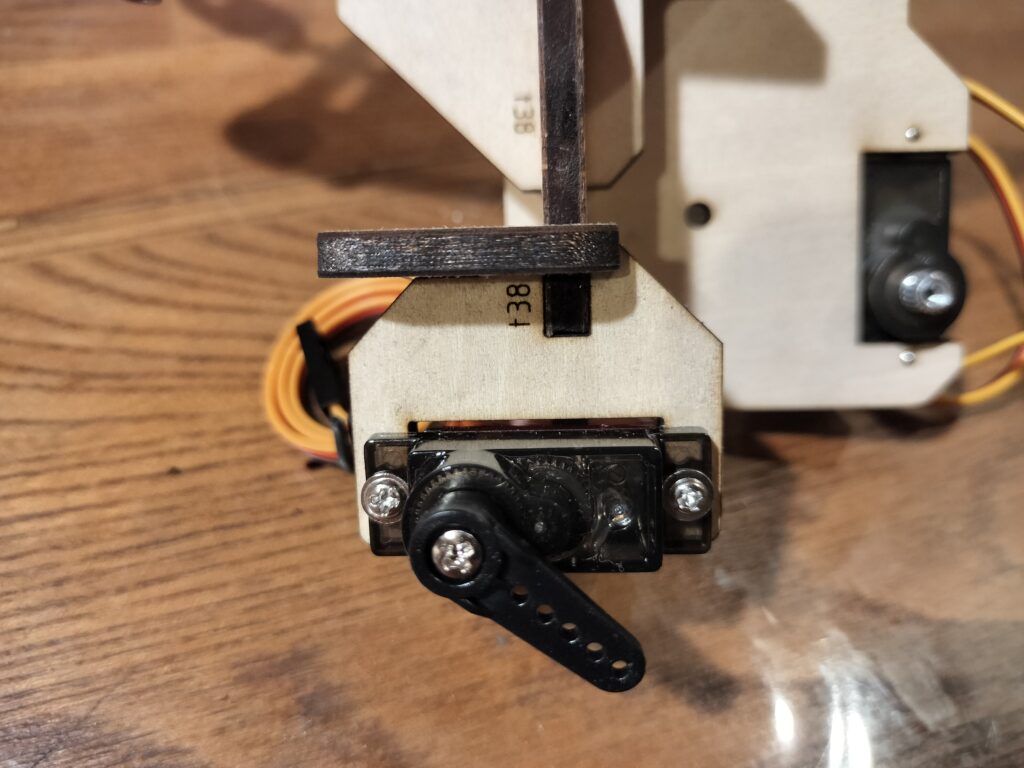
ドライブサーボ(MG90D)を取り付けます。出力軸が下になるようF4フレームの右側から取り付けます。

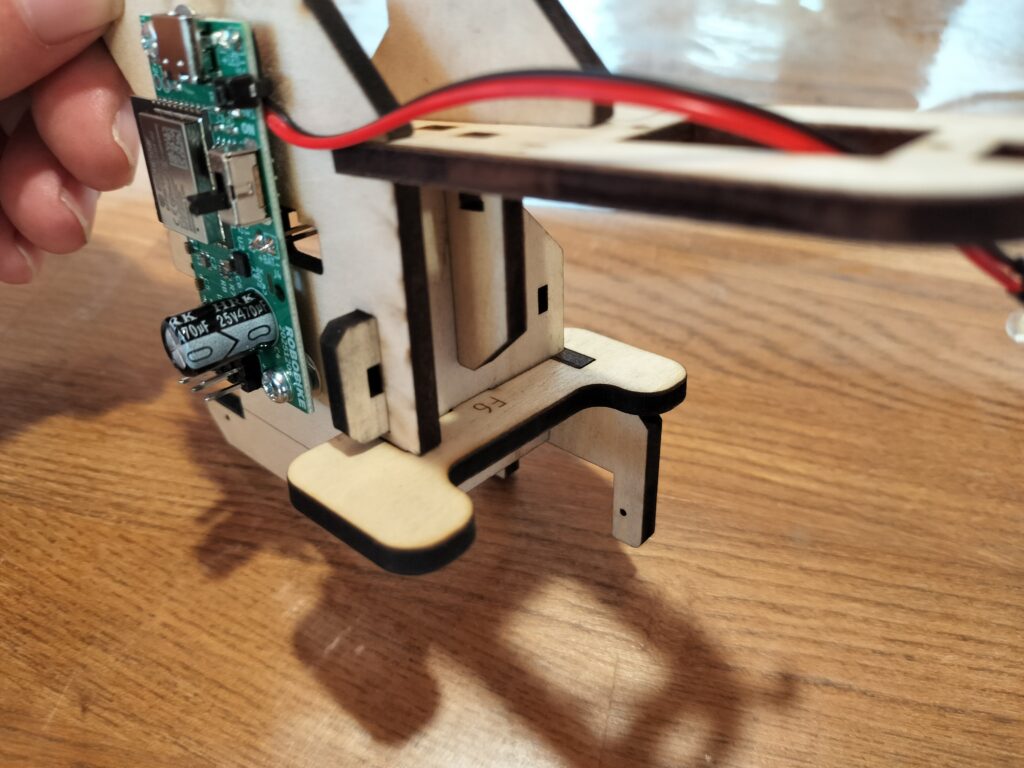
4. 制御基板の取り付け
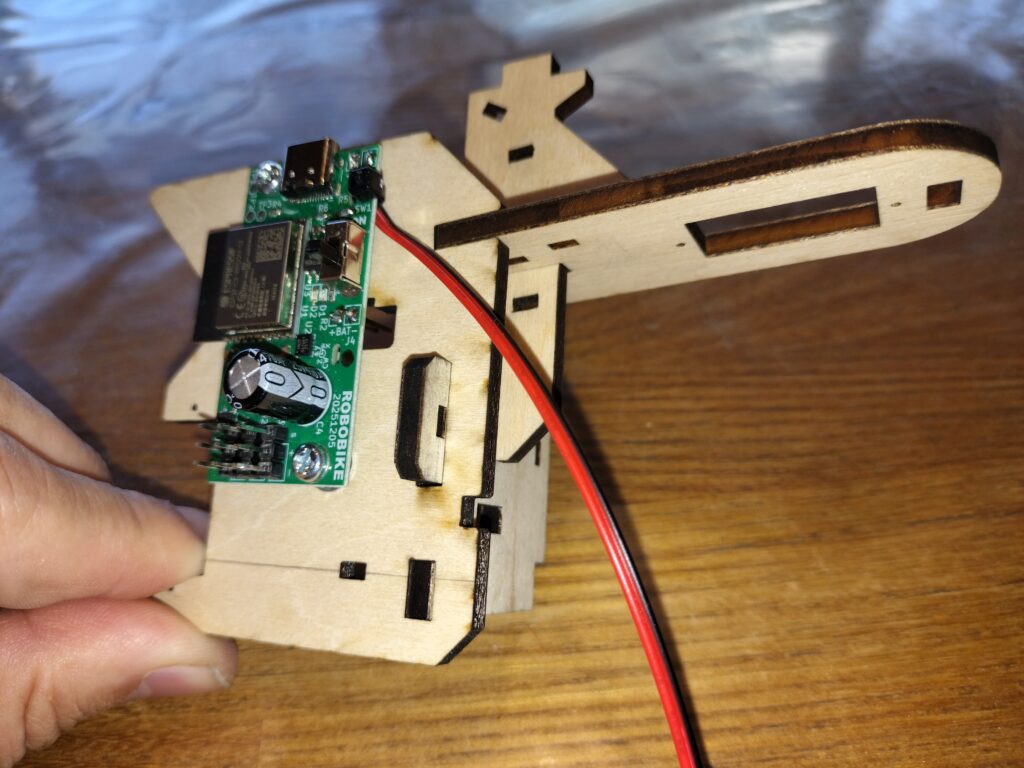
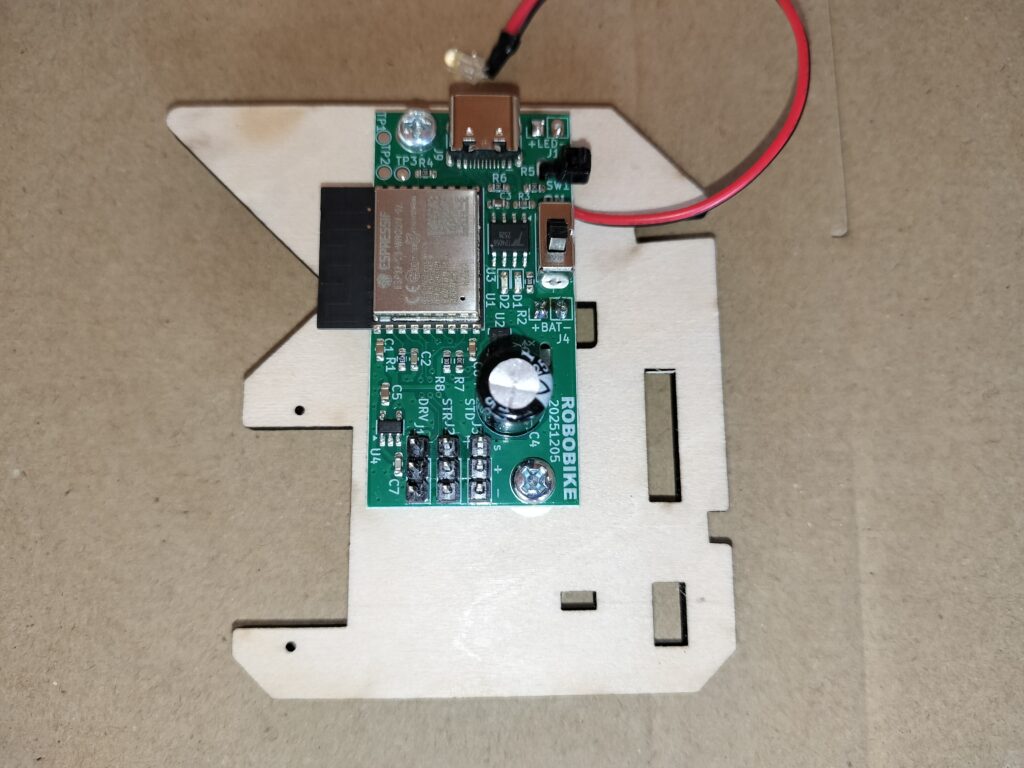
制御基板はあらかじめF4に取り付け済みです。
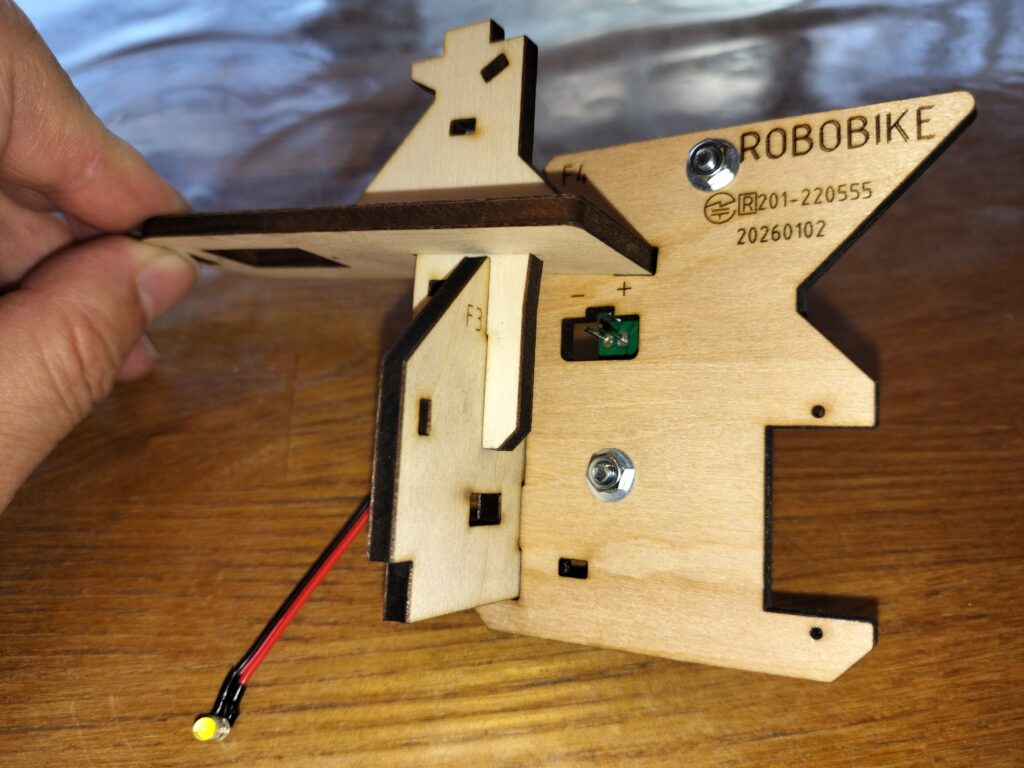
5. 前照灯の取り付け
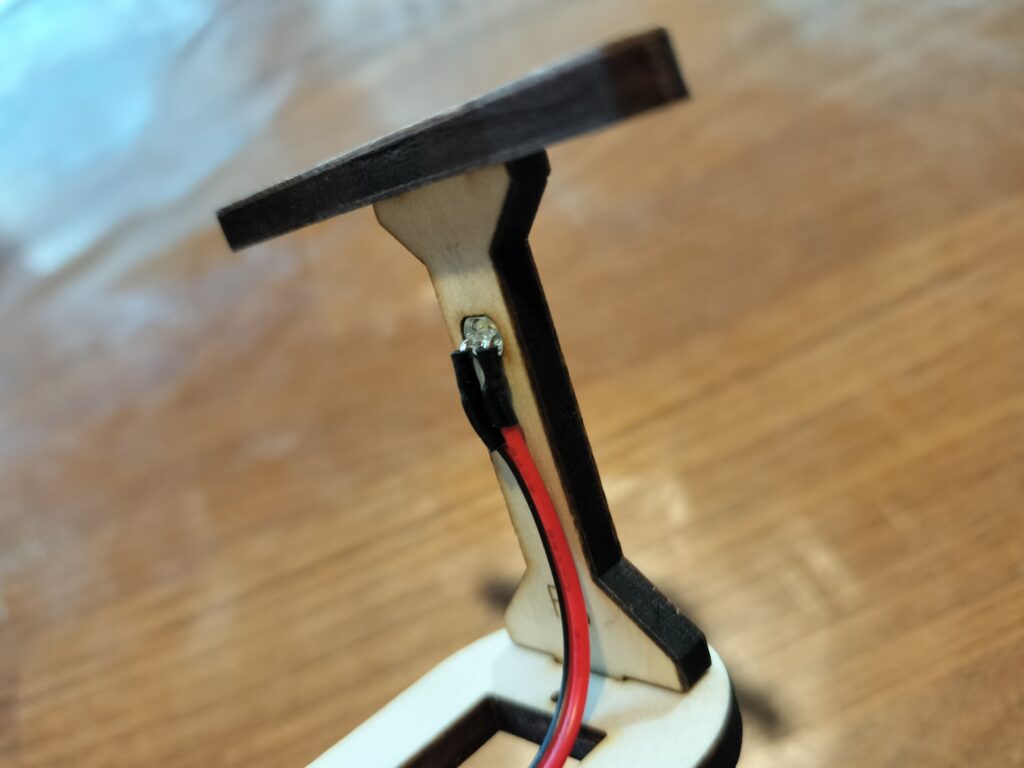
基板につながっている前照灯LEDをハンドル支柱の穴に後ろから差し込みます。
6. サーボ配線の接続
基板上のスイッチがOFF(下方へスライド)になっていることを確かめてから、サーボから出ているケーブルのコネクタを基板上の3ピン端子に接続します。サーボの接続は後ろから順に、ドライブ、ステアリング、サイドスタンドとなります。基板の表面に、[DRV]、[STR]、[STD]、のマーキングがありますので確認してください。
コネクタを挿す向きは、黄色のSIGNAL線が基板中心側(車体上方)、茶色の-線が基板の端側(車体下方)です。基板上の刻印[S + -]も見て、向きを間違えないように、奥までしっかり挿してください。逆に挿すと動作しません。
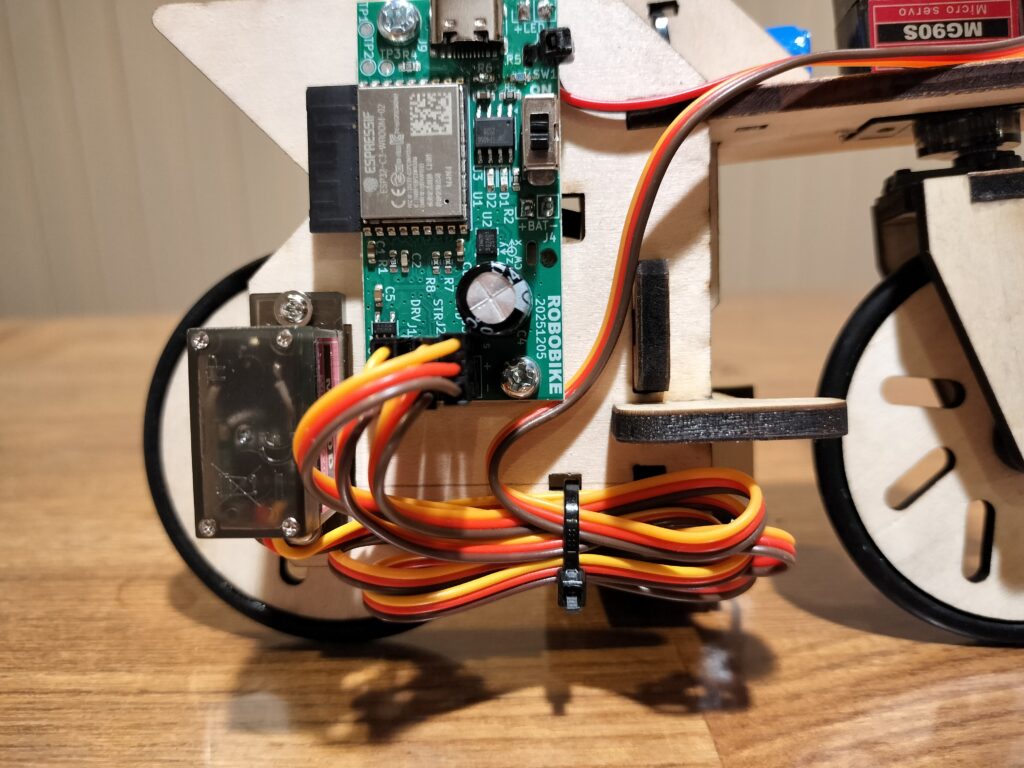
茶色が下方、黄色が上方
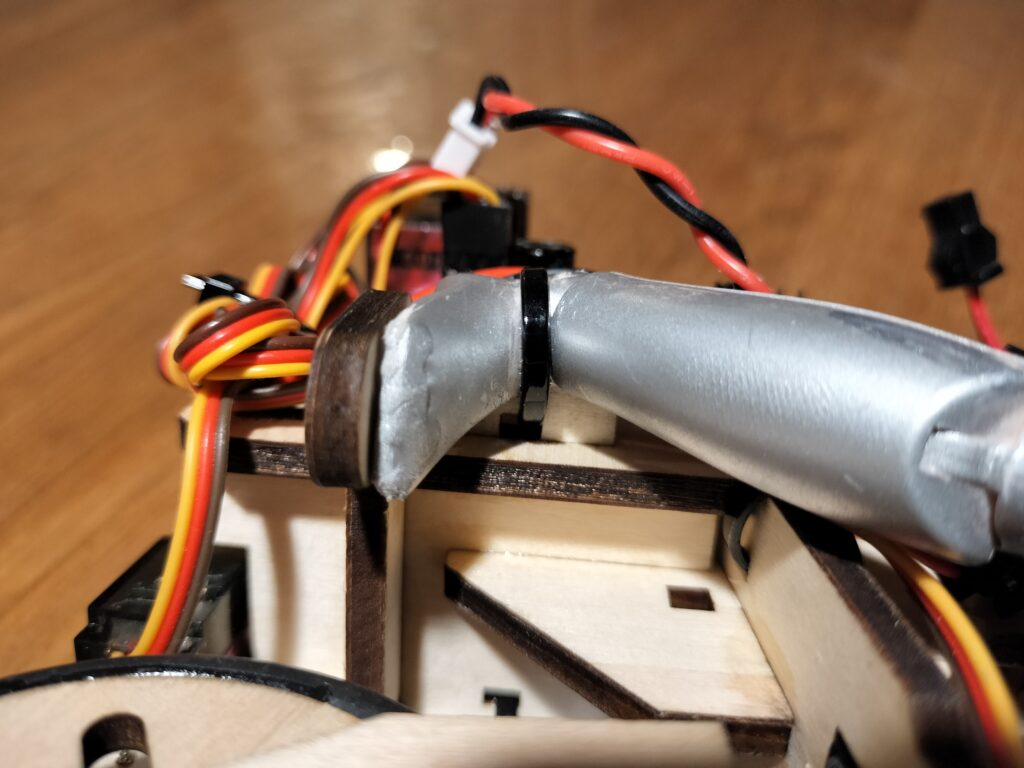
すべてのケーブルを接続出来たら、フレームNo.4の下の方に開いている穴に結束バンドを通して、ケーブルの余った部分をたたんで縛ってください。ケーブルを固定しないまま走行させると、軽い車体の揺れに対して重いケーブルが遅れて動くので、制御がうまく行かず転倒しやすくなります。また、車輪に絡まったり、その他可動部にあたらないよう注意してください。
7. 電池の取り付け
電池をF1の上側、[BATTERY]の刻印がある場所に取り付けます。

バッテリーを置く前に、結束バンドをフレームの穴に通してリング状にしておきます。

電池の配線をF4を貫通して基板に接続します。コネクタの出っ張りを上方に向けて挿入してください。

8. 人形の取り付け
人形は写真のように、腰と左右の足首に結束バンドを巻き掛けて、サドルとステップに固定します。


9. 電源ON、フロントフォーク、前輪、後輪の取り付け
コネクタを接続したら、電源スイッチを上方にスライドしてONにします。
この時、LED前照灯が淡く点灯していれば正常動作をしています。また、ステアリングサーボは直進位置、サイドスタンドは停車位置、ドライブサーボは停止しています。
車体に手を触れずに静置すると、数秒おきに前照灯が一瞬消えます。これはジャイロの静止状態を記憶する動作(オートキャリブレーション)が行われていることを示します。
フロントの組み立ての前に、フロントフォークに仮止めしてある前輪と、サーボ出力軸に仮止めしてあるM2.5X4のビスを抜いてください。次に、フロントフォークの前後を合わせて直進方向に向けてサーボ出力軸に差し込み、M2.5ビスで固定します。

このとき、できるだけまっすぐ直進方向を向く角度にして、奥までしっかり差し込みますが、この段階ではサーボ出力軸のギザギザの具合で完全にまっすぐにはならないので、可能な限りまっすぐに取り付けるだけにしてください。後にスマホを接続してから調整画面で、最終的なニュートラル調整を行います。
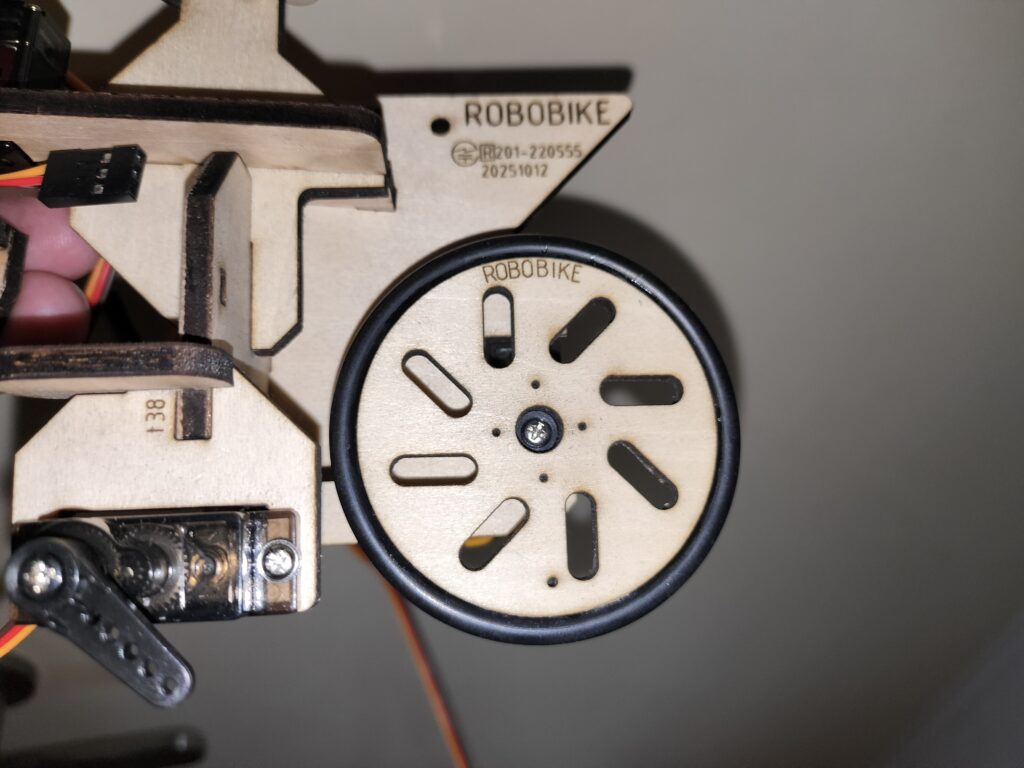
フロントフォークをサーボ出力軸にねじ止め出来たら、前輪をフォークの間に差し入れ、車軸を通します。車軸がフォークの両側に同じくらいはみ出るまで差し込んだら、車輪がクルクルと勢いよく連続回転するか、ガタが無いかを確かめてください。ガタなく軽く回るようでしたら、両側からホイルストッパーを嵌めてください。

対辺1.5mmのL型レンチでイモネジを軽く締め付け、もう一度、前輪がガタなく軽く回転するかを確認して、最後にしっかり締め付けます。
次にサーボ出力軸に仮止めしてあるM2.5X4ビスを抜いてから、後輪をドライブサーボの出力軸に差し込み、ねじを締め付けます。
10. 充電・スマートフォンの接続
スマートフォンを接続する前に、電源を切って、充電器と基板のUSBコネクタをTYPE-CのUSBケーブルでつないで充電をしておいてください。充電中は基板上の赤LEDが点灯します。満充電になるとLEDが青点灯に変わるので、充電ケーブルを抜いてください。
充電が完了したら電源スイッチをONにします。スマートフォンの設定でWi-Fiの親機を選択する画面を出し、SSIDが ROBOBIKE-ABC012 のような名前のアクセスポイントに接続します。ABC012の部分は、個体ごとに違った文字列になります。パスワードはありません。
接続に成功すると、自動的に操縦画面が表示されるはずですが、接続しても表示が出ない場合は
http://192.168.4.1
にアクセスしてください。
- 「この接続ではインターネットにアクセスできません、この接続を使い続けますか?」というような警告が出た場合は「はい」を選択してください。
- ROBOBIKE 1台に付き、スマートフォン1台を接続できます。2台目以降を接続しようとすると、「接続処理中...」というような表示が繰り返されて、接続に失敗します。
- 接続がうまく行かない場合はROBOBIKEの電源をいったん切って再投入し、スマホの接続設定画面を抜けて再度開きなおしてみてください。
11. ニュートラルの調整
ROBOBIKEを走行させる前に、ステアリングの直進方向、サイドスタンドの角度を調整します。
スマホを接続できたら、操縦画面の下の [ADJUST/SETUP]ボタンをタップして調整画面に移動します。
なお、初回接続時には自動的に調整画面が開くようになっています。
・ステアリング直進方向の調整
フロントフォークの向きがまっすぐ前方に向くよう、STEERING NUTRALの[←][→]ボタンをタップして、ニュートラルを調整します。前方から見て、前輪と後輪が一直線になるよう調節してください。

[STEERING NUTRAL]の数値が+-20に達してもまっすぐにならない場合は、ステアリングフォークの取り付けを直す必要があります。イモネジを緩めて前輪を取り外し、フロントフォークを抜き、[STEERING NUTRAL]の値を0に戻してから、セレーションのかみ合いをずらして挿しなおしてください。
・サイドスタンドの角度調整
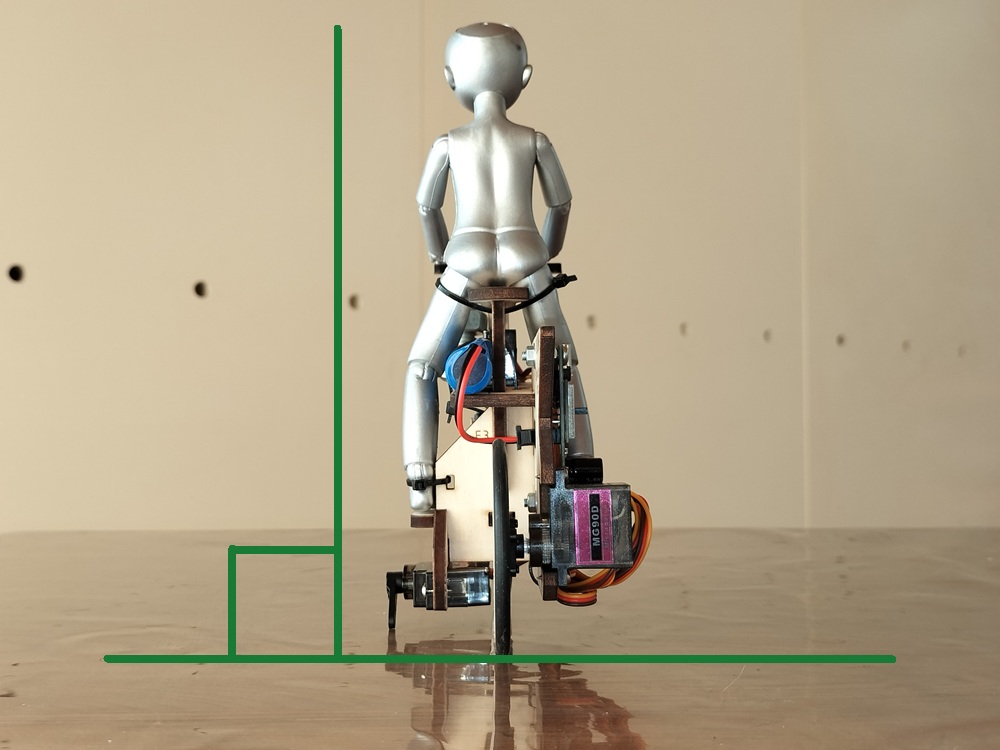
スタート時は速度が遅く舵を切っても傾きの修正ができないため、車体をあらかじめ垂直にしておかないと転倒してしまいます。そこでスタート時に車体が垂直になるよう、サイドスタンドの角度を調整します。人形を手で支えて垂直に保持しながら、[STARTING TILT ANGLE] の下にある[←][→]ボタンをタップすると、サイドスタンドが降り、スタート時の垂直保持の角度まで床を押して車体が立ち上がります。スタンドが降りた状態で、手を離してギリギリ倒れない角度になるよう、左、右ボタンをタップして調整してください。
・旋回半径の調整
旋回半径を小さくして急旋回をさせるには [STEERING MAX] の値を増やします。はじめはデフォルトのままにしてください。きつい旋回をすると、制御しきれずに転倒しやすくなります。
・ドライブスピードの調整
走行速度は最大(60)のままで調整は不要ですが、低速側は倒れずに走れる限界を探ることが可能です。
・調整結果の保存
[SAVE/RETURN]ボタンをタップして、調整結果を不揮発メモリ―に保存し、操縦画面に戻ります。
上記の調整は組み立てた後に一度だけ行えばOKです。
ただし、転倒させた場合や、室温が変化したとき、長期保管の後などは調整がずれることがありますので、うまく走らない場合は再調整してみてください。また、調整後はジャイロのゼロ点補正が効くまで手を触れずに静止状態を保ち、完了を待ってください。
なお、調整画面にある [ADVANST SETTINGS]ボタンで開く画面は、PID制御のパラメーターを変更するための画面です。通常は設定変更の必要はありません。
ただし、[LOAD DEFAULT]ボタンを使用してデフォルトの値に戻すことが可能ですので、すべての設定を工場出荷状態に戻したい場合は、このボタンでデフォルト値に戻してください。
12. 走行前の点検項目
- フロントフォークの取り付けにガタはないか
- ステアリングサーボの取り付けにガタは無いか
- サーボホーン取付ビスは締めてあるか
- 前輪はスムーズに回転するか
- ドライブサーボの取り付け、後輪の取り付けにガタは無いか
- ゴムタイヤが全周にわたり車輪としっかり接着されているか
- 電池の充電は済んでいるか
- 電池の取付はF1のマーキング位置にあるか
- ロボット人形の取り付けにガタはないか、左右に傾いていないか
- プリント基板の取り付けにガタが無いか
- フレームの組み合わせ部分にガタがないか
- ステアリング、スタンドの調整は済んでいるか
- 電源ONで停止中、前照灯が数秒ごとに点滅して、自動補正が働いているか
- 配線のコネクタが浮いていないか
13. 走行
なるべく平滑で広い床で走らせてください。1m X 2m程度の広さがあれば走行は可能ですが、可能な限り広い場所を推奨します。一般の住宅であれば、廊下やリビングのフローリング仕上げの床が最適です。タタミや絨毯の床は適していません。なお、クッションフロアやコルクのような表面が柔らかい床は、停車時にサイドスタンドが反発して転倒することがあります。
金属製の床では、転倒したときに回路が短絡して火災の恐れがあるため、ROBOBIKEを走らせないでください。
操作画面のコマンドは下記の通りです。
| ↑FORWORD | 停車時:発車 / 旋回走行中:直進にもどる |
| !STOP | 停車(サイドスタンド展開) |
| ←LEFT | 左旋回開始 |
| →RIGHT | 右旋回開始 |
| スライドバー | 旋回半径の微調整 |
| SETUP | 調整画面を表示 |
操作ボタンは、一回だけタップしてください。押し続ける必要はありません。
[←LEFT] [→RIGHT]ボタンを一回タップすると、[↑FORWORD]ボタンをタップするまで旋回を続けます。
[スライドバー]を左右に移動させると、ハンドル切れ角を好きな角度に変化させることができます。
止めたいときは、[!STOP]ボタンをタップしてください。サイドスタンドが自動展開して停車します。
14. オートスリープ
ROBOBIKEは、停車後10分間操作をしないで放置すると、スリープモードに入って消費電流を削減します。スリープモードでは通信機能を含めすべての動作を停止しますが、少ないながらもスリープ電流が流れ続けていますので、走行終了後は必ず電源スイッチを切って保管してください。
スリープを解除するにはいったん電源スイッチを切ってから、もう一度ONにしてください。
15. 注意事項
こちらのページにも注意事項をまとめてありますので、一読してください→https://robobikejp.com/manual02
- 周囲の温度が20℃を下回ると、走行速度が下がり、転倒しやすくなることがあります。
- 周囲温度が下がると電池の電圧も下がるため、満充電にすると電源電圧が上がり、改善する場合があります。
- 満充電でも走行速度が遅いときは、設定画面の[DRIVE SPEED]の[↑]をタップして後輪を回転させ、暖機運転を数分するとギアトレーンの抵抗が小さくなって回転が上がることがあるので試してください。
走行中はなるべく旋回をさせず、サーボの温度が上がって走行速度が速くなるのを待ってください。 - 湿度の高い環境では木製部品が吸湿して寸法に変化が生じ、前輪の回転がスムーズでなくなる場合があります。前輪の車軸を止めているストッパーをゆるめ、前輪が抵抗なく回るようフロントフォークを開くか、前輪のハブを削って隙間を確保してください。
- しばらく走らせると、綿埃や髪の毛などが車軸に絡まって動きが悪くなります。走らせる前に車軸周りをよく観察し、絡まっているものがある場合は、車輪を取り外して清掃してください。
- 操縦画面のボタンをタップしても反応が無い場合は、いったん電源を切って入れなおしてみてください。Wi-Fiの接続が切れ、再度つなぎ直すと回復することがあります。
- ステアリングサーボMG90SとドライブサーボMG90Dの出力軸は、太さが異なっています。したがってサーボホーンの互換性がありませんので、サーボホーンを車軸やステアリングフォークから取り外した際にはご注意ください。
- 車輪外周のゴムタイヤが部分的に動いてしまう場合は、タイヤと車輪の境目に両側から瞬間接着剤を流して固定してください。
16. ファームウェアのアップデートと開発ドキュメント
ROBOBIKEでは、改良版のファームウェア(制御基板のソフト)が提供されることがあり、下記の手順で最新のファームウェアに書き換えることができます。
書き換えには専用のWindows用アプリが必要なため、インターネットに接続された Windows11 で動くPCをご用意ください。MacやLinuxは非対応です。
なお、この機能を使うにはある程度PCの使用方法に習熟している必要があります。書き換えに自信のない方でファームウェアを更新したい場合は、購入フォームから「制御基板」を選択して、最新の基板に交換してください。
- 書込みツールのzipファイル(espwriter.zip)を章末のリンクからダウンロード
・zipファイルを展開すると100Mバイト以上になります。ストレージの空き容量をご確認ください。
・ファイルのダウンロードに際し警告が出る場合がありますが、続行してください。 - PC上のディスクに適当なフォルダを作って、zipファイル内のespwriterフォルダをコピーし、展開してください。
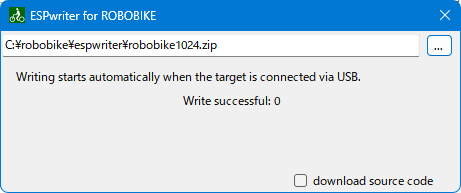
(ex. C:\robobike\espwriter\.....) - 書込みツールアプリ=espwriter.exe (ex. C:\robobike\espwriter\espwriter.exe)を起動すると、起動時に最新のファームウェアをダウンロードします。ダウンロードが完了するとダイアログが表示されるので、[OK]を選ぶとメイン画面が表示されます。
*「このファイルの作成者を確認できません。実行しますか」という表示が出た場合は「実行する」を選んでください。
*「.NET 8 ランタイムをダウンロードしてインストールしてください」という表示が出た場合は、指示に従いインストールしてください。
* 書き込みの代わりに、ソースコードのダウンロードを行うこともできます。download source code のチェックボックスをONしてください。 - PCのUSBポートとROBOBIKEの充電ポートをUSB type-Cケーブルでつなぎ、ROBOBIKEの電源をONにします。
- ROBOBIKEの接続を検知すると自動でログ画面が開いて書込みが始まり、10秒程度で終了します。
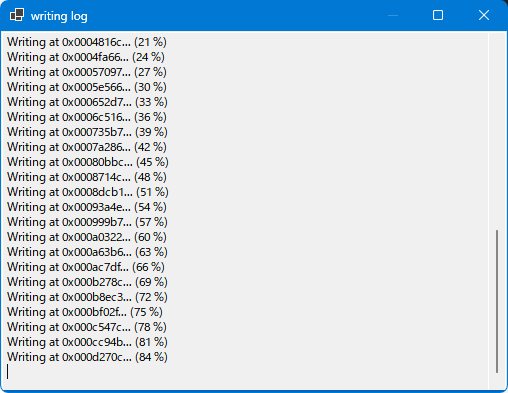
* ソースコードのダウンロードを選択した場合は、書き込みはせず、代わりにソース一式のzipファイルをダウンロードします。 - 「Write Success」 の表示が出たらROBOBIKEの電源をOFFして、ケーブルを外します。
- 回路図はソースコード一式のzipファイルに同梱されています。
以上となります。
書込みにあたっての注意事項
- USBケーブルは通信機能があるものをご使用ください。充電専用のケーブルでは書込みできません。
- まれに、通信機能付きの正しいケーブルで接続しても、書込みソフトが接続を認識できない場合があります。その場合、下記の試行をすると改善されることがあります。
・書込みソフトを再起動し、ROBOBIKEの電源を切って再度ONする
・USBケーブルのPC側がTYPE-Aのケーブルで接続する
・PCを再起動する
・PCのUSBポートを別のポートに変える
・USBハブを間に入れる
・ハブを通さずに直接PCのポートにつなぐ
・別のPCを使用してみる
どうしても書込みができない場合、最新のファームを書き込んだ制御基板に交換することができます。購入フォームから、基板単体を選択してお申し込みください。 - 書込み中は、PCとROBOBIKEの接続ケーブルを外さないでください。電源断などで書き込みを中断した場合、制御基板が使用できなくなることがあります。
- 新しいファームが書き込まれると、場合により調整値がリセットされることがあります。スマホを接続してすぐに調整画面が表示された場合は、走行の前に「10. ニュートラルの調整」を行ってください。
書込みツール
変更履歴
| 日付 | CODE ver. | DATA ver. | 摘要 |
| 2026.02.20 | 1024 | 1021 | 較正動作修正、auto circling On/Off 追加 |
| 2026.01.28 | 1022 | 1021 | 展示用 auto circling 追加 |
| 2025.12.17 | 1017 | 1015 | スタンドサーボスムージング |
| 2025.11.29 | --- | --- | espwriter.exe:ファームファイルをアプリ内でDLするよう変更 |
| 2025.11.29 | 1016 | 1015 | ステアリングスライドバー追加 |
| 2025.11.11 | 1014 | 1014 | 画面伸縮抑制、調整項目追加、停車シーケンス変更 |
| 2025.10.28 | 1011 | 1011 | 調整画面変更 |