世界初の技術で、倒れずに2輪で走るロボットです。
最新情報
2026.06.05 プログラムのバージョンアップを公開しました
・Ver.1032 プログラムアップデートのやり方はこちらhttps://robobikejp.com/manual01/#usb_update
2026.06.03 Maker Faire Tokyo 2026 へ出展することになりました!
・日本最大、メイカーの祭典はこちら → https://makezine.jp/event/mft2026/
2026.05.13 車上撮影のテスト成功
・スマホを背負って走らせるテストをしました。重さが150g以上ありますので、自重と同じくらいのペイロードを載せていることになります。

2026.05.08 ver.1029の情報
・無線によるプログラム更新に対応、テレメトリー機能搭載
・制御演算最適化により、安定性を向上しました。
1. モバイルボット研究会によるROBOBIKEとは
自転車は乗る人が積極的に操縦することで倒れずに走れますが、ROBOBIKE はコンピューターの自動操縦によりバランスを取って走ります。
ROBOBIKE は「アクティブなハンドル操作で2輪車の転倒を防ぐ」という、一見シンプルで奥が深い課題への解答であり、組込み制御・自動制御を学ぶための教材を提供いたします。
2. 転ばずに走り続ける30年の夢
ROBOBIKE は、1990年代にテレビCMで話題となった、村田製作所の自転車ロボット「初代ムラタセイサク君」1の開発を手掛けたモバイルボット研究会のエンジニアによる、30年越しの再挑戦です。
初代ムラタセイサク君は、操舵によって転倒防止をする世界初の自転車ロボットであり、ふらつきながらも健気にバランスを取って走る姿が話題を呼びました。当時、小さい体で一生懸命に走るロボットを見た人たちからは、広く一般に普及させてほしいという声が多く寄せられましたが、技術的な限界や製造原価の壁に阻まれ、量産化は叶いませんでした。 「もっと多くの人に触れてもらいたかった」——その悔しさは、開発者の心に深く刻まれ、長年にわたり技術の進化を見つめ続ける原動力となりました。
そして今、最新のセンサー技術により、手を触れずに「停止→走行→停止」を自然に移行するという、新しい体験が可能に。さらに現代の製造インフラの進化により、低コストで製作可能という技術的ブレイクスルーが起きました。ROBOBIKE2は、往年の自転車ロボットの技術的DNAを受け継ぎながら、より多くの人に届く形で再び世に出ることを目指しています。
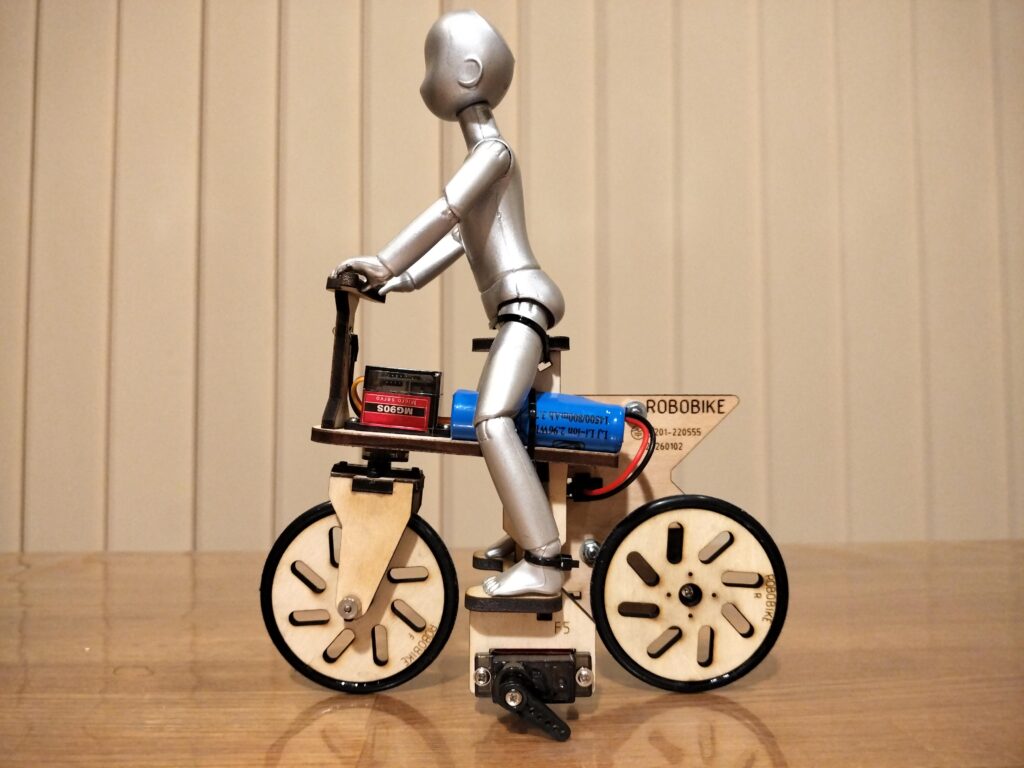
3. ROBOBIKEの主要諸元
【寸法】L160mm x W80mm x H205mm
【重量】約160g
【車輪直径】60mm
【走行速度】0.25m/秒
【通信方式】WiFi 2.4GHz帯
【操作方式】スマートフォンでWEBページを表示
【複数同時走行】可能
【電源】3.7V 800mAh 充電池
【稼働時間】約2時間
【充電方式】5V 1A スマホ用USB充電器 type-C *
【材質】木材、合成ゴム、PC樹脂、PVC樹脂、アルミ合金、その他
【法規制対応】電波法工事設計認証取得済、電気用品安全法(PSE)対象外
【ソフトウェア開発対応】書込みソフトまたは無線(OTA)によるソフトウェア更新、SDKを提供
* USB充電器と充電ケーブルはキットに含まれません。
ROBOBIKEの仕様は、品質向上などの目的で、予告なく変更される場合があります。
また、このページの写真、図表は試作品をもとにして作成されており、最新のものとは異なる場合がありますのでご了承ください。
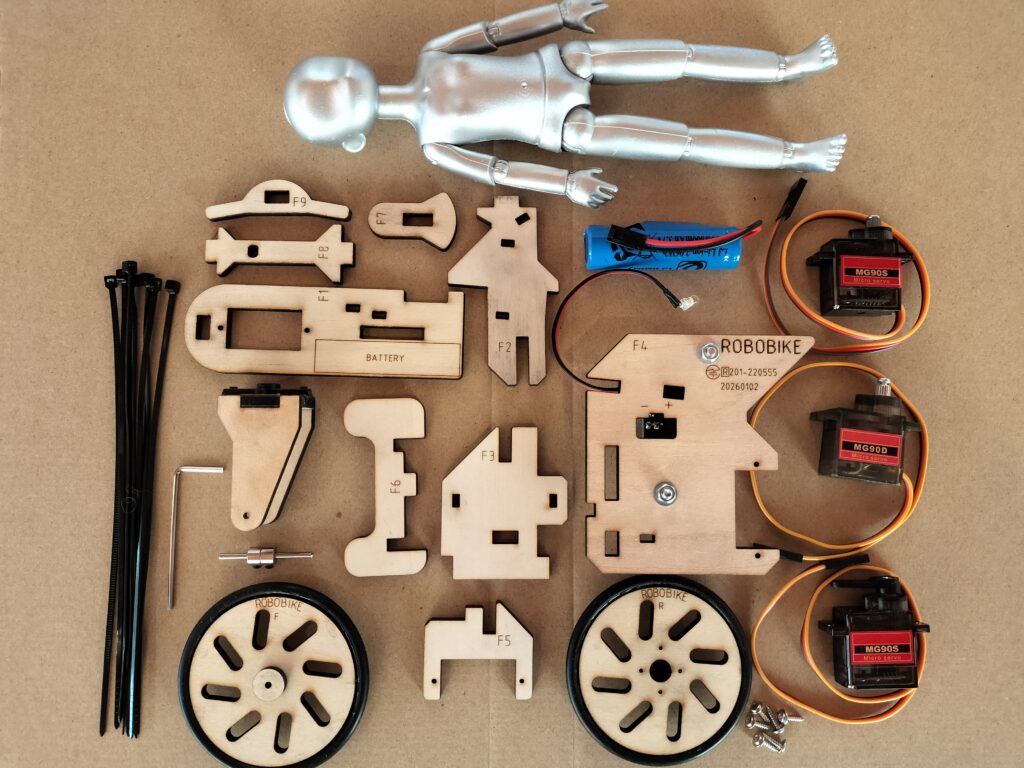
4. キットの内容
ユーザー自身が組み立てることで、構造や制御の仕組みを深く理解できるキットを開発しています。
📦 キットに含まれるもの
ROBOBIKEのロゴの下にいわゆる「技適」番号が見える
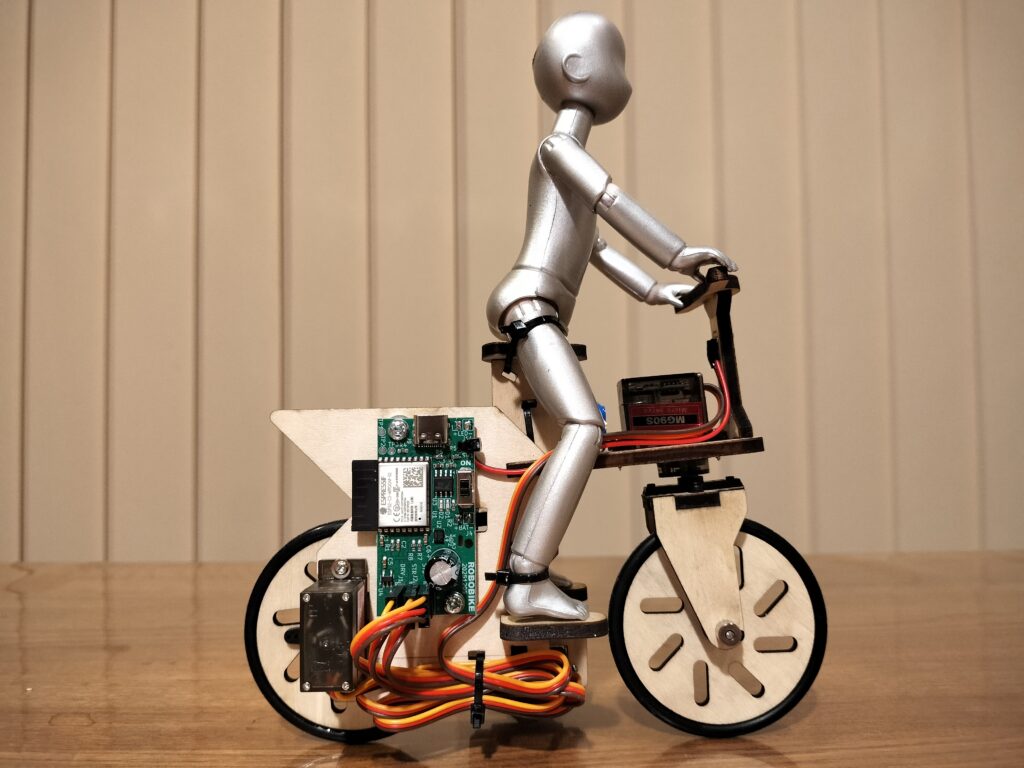
【制御基板】
WiFi機能付きマイコン搭載、ジャイロセンサー、充電制御、サーボ制御。
希望者には回路図とソースコードを提供
【電池】
Li-ion充電池、USB充電対応
【サーボユニット】
ステアリング:小型サーボ、サーボホーンはフロントフォークに取付済
サイドスタンド:小型サーボ、サーボホーン取付済
後輪駆動:連続回転サーボ、サーボホーンは後輪に取付済
【人形、前照灯】
ロボット型人形×1
LEDユニット×1(制御基板と接続済)
【その他の構成部品】
L型6角レンチ、結束バンド、前車軸、ホイルストッパー等
【対象年齢の目安】12歳以上
※組み立て、走行にはキットのほかに、下記の工具類をユーザー様でご用意ください。
・ 瞬間接着剤(低粘度型)
・ +ドライバー(1番)
・ スマホ用USB 5V充電器、充電ケーブル(TYPE-C コネクタ)
・ 操縦用のスマートフォン(WiFi接続ができるもの)
5. ROBOBIKEの技術
🔧 ジャイロセンサーの進化と自転車型ロボットの系譜
1990年代、「振動ジャイロ」が登場し、コマが回転する従来のジャイロに比べて小型・高感度・高速応答を実現。ビデオカメラの手振れ補正やラジコンヘリの安定化に活用されました。そしてROBOBIKEの開発者の手により、振動ジャイロを活かした世界初の自転車型ロボット、初代ムラタセイサク君が開発されました。
当時の仕様を記憶を頼りに書き出してみます。
・ ジャイロセンサー: MURATA ジャイロスター(三角柱型振動ジャイロ)
・ CPU: 日立 H8-532 16bit 20MHz(UVEPROM)
・ R/C送受信機: JR カー用2ch PCM
・ 後輪駆動モーター: マブチ RS-380
・ 前輪操舵用サーボ: JR NES-4721
・ フレーム: アルミ厚板レーザーカット2枚平行式
・ 車輪: アルミ切削加工による高級品
・ 軸受: 走行機構部分ボールベアリング使用
・ 制御基板: ユニバーサル基板+手配線
・ 電源: NiCd電池 4.8V
・ 重量: 1kg弱
といった感じでした。

初代ムラタセイサク君においては、迫力を求めて大型化したバージョンも作られました。主要コンポーネントは同じものを使いましたが、制御ゲインを高めて修正舵を多く切る必要があり、単純に大きいほうが簡単というわけではなかったのが意外でした。
大型化すると動きがゆっくりになり、コミカルさがいっそう増したためか、TVCMにはこちらが使われるようになったと記憶しています。
それから30年余り、半導体技術の進歩により、センサーは米粒より小さく、無線モジュールも小さく安くなり、感度・精度・安定性・応答速度が飛躍的に向上。フレームのレーザー加工や、サーボなどのメカ部品も手軽に買える値段となり、個人でも作れるレベルの低コスト化を実現。ROBOBIKEは、そんな現代の技術に支えられて走ります。
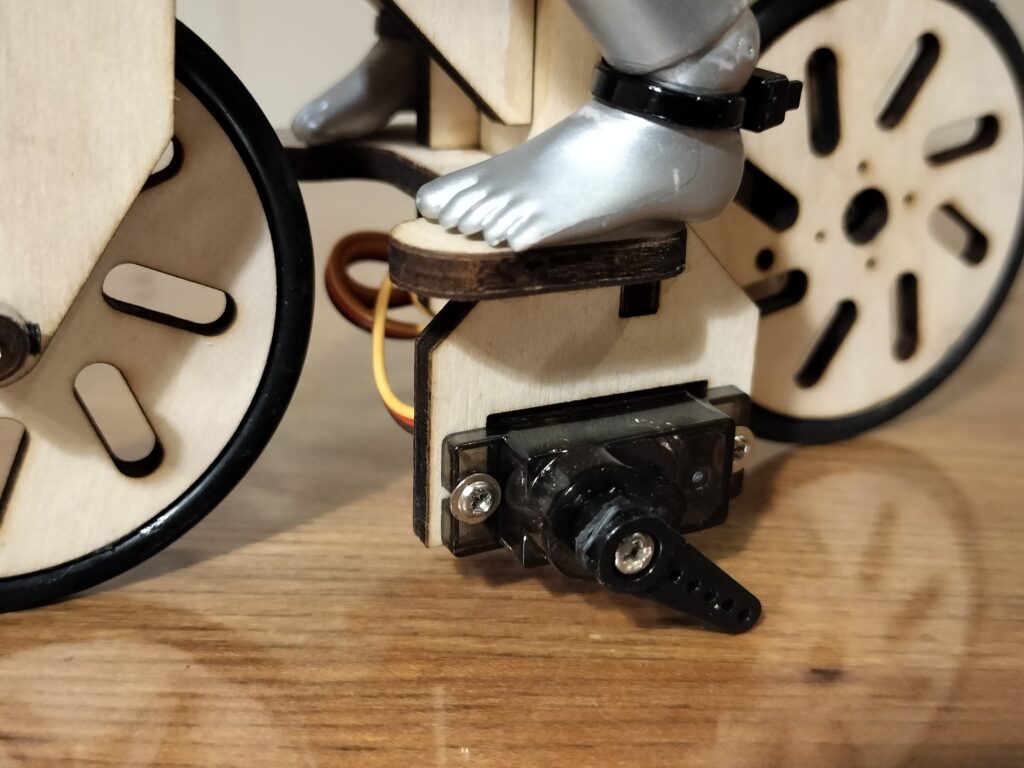
🚴♂️新機軸 オートサイドスタンド
ROBOBIKEは、停車時のスタンド展開と走行中の転倒防止制御をつなぐ新技術「オートサイドスタンド」を搭載。
初代ムラタセイサク君は、発進時に手で支えて垂直を保つ必要があり、少しでも傾いていると転倒してしまう弱点がありました。
ROBOBIKEでは、サイドスタンドによって人の手を借りずに停車状態から走行状態へ移行することができ、より自然な操縦体験を可能にしたのです。
🚴♂️スマホで操縦、アプリ不要
ROBOBIKEは、搭載するマイコンが内蔵するWiFi通信機能を活用し、スマートフォンから直接操縦できます。 ROBOBIKE本体が自らWi-FiアクセスポイントとなってWebサーバーを立ち上げ、スマホを接続するとすぐにWebの操作画面が表示されるので、専用アプリは不要です。
iPhone、Android、いずれでもまったく同じ操作性を実現しています。
操作画面はシンプル
発進・停止・旋回・後進の動作が可能。誰でもROBOBIKEの操縦を楽しめます。
後進はスタンドを出したまま滑らせる簡易的な方式です。
加えて、サーボの角度を調整したり、制御パラメータのアジャストやセンサーの較正をする機能を用意。一台ごとにきめ細かな調整が可能です。
走行環境について
ROBOBIKEを走らせるには、タタミ1畳ほどの滑らかで水平な床が必要です。フローリングやクッションフロアが好適です。
タタミ、毛足の長いじゅうたん、屋外の路面等の走行は難しいですが、室内ガレージなど平滑なコンクリートの床であれば走行可能です。
複数台の同時走行も可能
それぞれのROBOBIKEに別々にスマホを接続すれば並走も可能です。

2台同時走行の様子です。
🔧 教材としての価値
ROBOBIKEの制御システムには、下記のような機能を実現するプログラムが含まれています。
ユーザーには、githubを通じて、ソースコードや回路図等の技術資料の提供をいたしますので、組込み制御・自動制御を学ぶ教材として最適です。
・ 32bit RISC-Vコアの無線モジュールによる組込み制御
・ ESP-IDF(C言語)によるネイティブ開発対応、Arduino依存からの脱却
・ I2Cによるジャイロセンサー制御
・ RTOSによる割り込み・タスク連携、タイマー、PWM信号生成
・ 高速演算ループによる転倒防止と方向制御
・ 内蔵Wi-Fiアクセスポイントの活用
・ HTML+JavaScriptによるWeb UI
・ サイドスタンドの自動展開、収納
・ LED前照灯(走行中:点灯、停止時:減光)
・ ロボット人形は重心位置調整用ウエイトとして機能
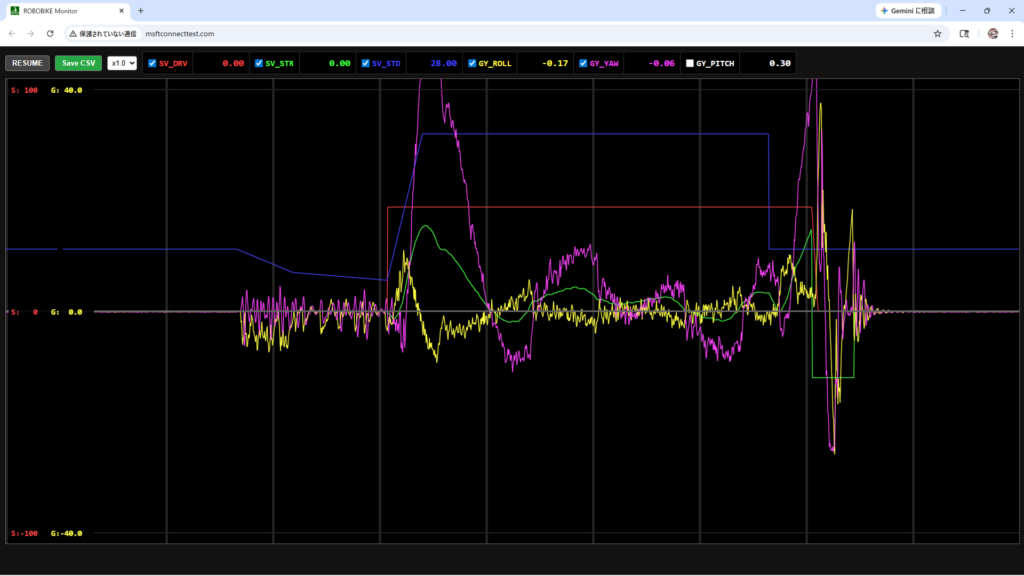
・ テレメトリーにより走行中のセンサーの値やサーボ出力をオシロスコープ風モニター画面に表示
・ 受信したデータはcsvファイルで保存して、動作の解析に利用可能
・ OTAによるプログラムの更新機能
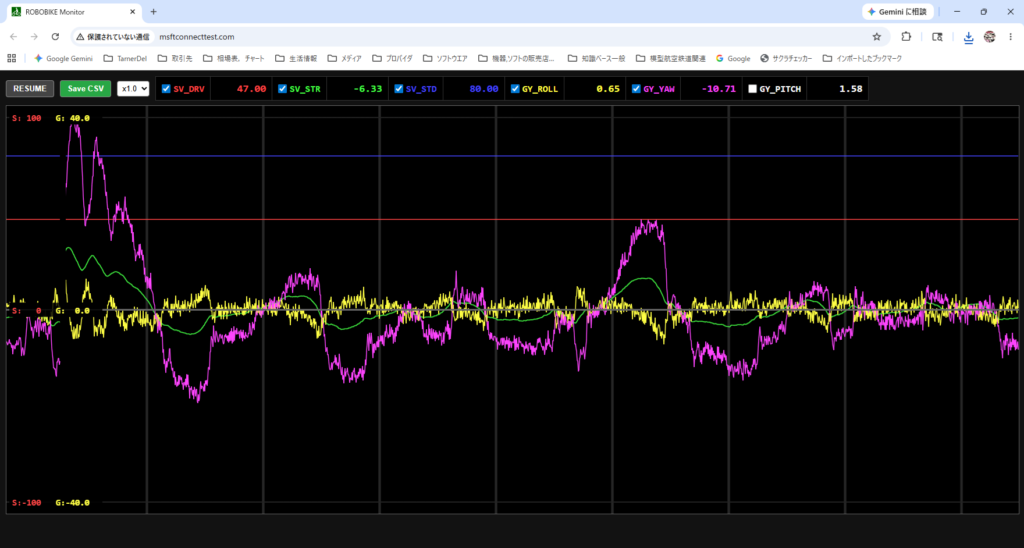
左旋回から直進へ移行、途中やや大きく右に振れた後戻している
※ 人形は交換可能ですが、パラメータの再調整が必要になる場合があります。
※ ソフトウェアの改変や再配布については、本サイトの「注意・免責事項」をお読みください。
6. 今後の展望
・ 技術資料の充実、論文発表
・ 教育機関向けの教材化を推進
・ ワークショップでの活用
・ オープンソース化による改造・拡張の促進
・ 6軸IMUを活用したより高度な制御(停車時にも倒れない操縦など)の研究
7. 注意事項とよくある質問(FAQ)
このページ掲載の写真、仕様は開発途中のものであり、随時変更される場合があるのでご了承ください。
詳しい取扱説明書や仕様は https://robobikejp.com/manual01/ で公開していますので、参考にしてください。
・ROBOBIKEはどうして転ばないのですか?
ROBOBIKEのハンドルの動きを見て考えてみてください!
ちなみにジャイロ効果で転ばないと言われることがありますが、ジャイロ効果(=歳差運動)は低速走行する2輪車の安定に寄与しません。
・走らせた時の面白さは?
組立後の調整が完了すれば、自由なコースどりで走れるようになります。
ROBOBIKEに乗っているのはロボット型の人形にすぎませんが、まるで意思を持って操縦しているような錯覚に陥るほど、違和感のない存在に見えてきます。
・組み立ては難しいですか?
接着剤とドライバー等の簡単な工具があれば、1〜2時間程度で完成します。また図解付きのマニュアルをこちらのWEBページ→ https://robobikejp.com/manual01/ にて提供いたします。
・組み立てたがうまく走らない場合は?
取扱説明書を読んで、確認事項をチェックしてみてください。
それでもうまく行かない場合は、お問い合わせのページから詳しい状況をご連絡ください。解決策をご提示できる場合があります。
・プログラムの更新はできますか?
性能向上や不具合対策としてプログラムのアップデートが行われたときには、ユーザー様にて最新版に更新することができます。ver.1029以降であればWiFi経由で簡単にプログラムの更新ができますし、それ以前のバージョンでも、USBケーブルをPCとつないで最新版に更新することができます。詳しくは取扱説明を参照してください。
・部品を入手できますか?
予備部品の在庫があれば対応できますので、https://robobikejp.com/manual03/ からお問い合わせをお願いします。
・教育用途で使えますか?
ユーザー向けに、githubを通じて回路図やプログラムのソースコードを提供していますので、自動制御理論、センサ技術、組込みシステムの教材として好適です。
・法規制に対応していますか?
電波法に基づいた認証を取得済みですので、安心して使用できます。
・電池は安全ですか?
モバイルバッテリーと異なり、PSE対象外の低エネルギー密度の電池を使用しているので、危険性は低くなっています。しかし、尖ったもので傷つけたり、衝撃を与える、分解、短絡、高温、多湿、水没などは事故を招く恐れがありますので、取扱いには十分ご注意ください。