モバイルボット研究会代表/ROBOBIKEJP.COM 管理人は、一日の大半を鉄道模型や電気工作、そして模型飛行機(Uコン)と戯れる模型少年でありました。
当時はキットや完成品を買う余裕がなかったので、バルサやヒノキ棒を切り出して機体を自作していました。およそ3ヵ月に一機というペースで、設計図を描き、作り、飛ばし、墜落して壊れると次の設計にかかる、ということを繰り返しておりました。
毎年冬に、中・高校生の全国大会がありました。ゴールデンウィークを過ぎたころにその年の出場機を設計し、夏休み中に製作、完成した日から大会まで毎日飛ばす練習をしていました。努力の甲斐あって全国1位になり、「Uコン技術」という専門誌に機体の製作記事が掲載されています。
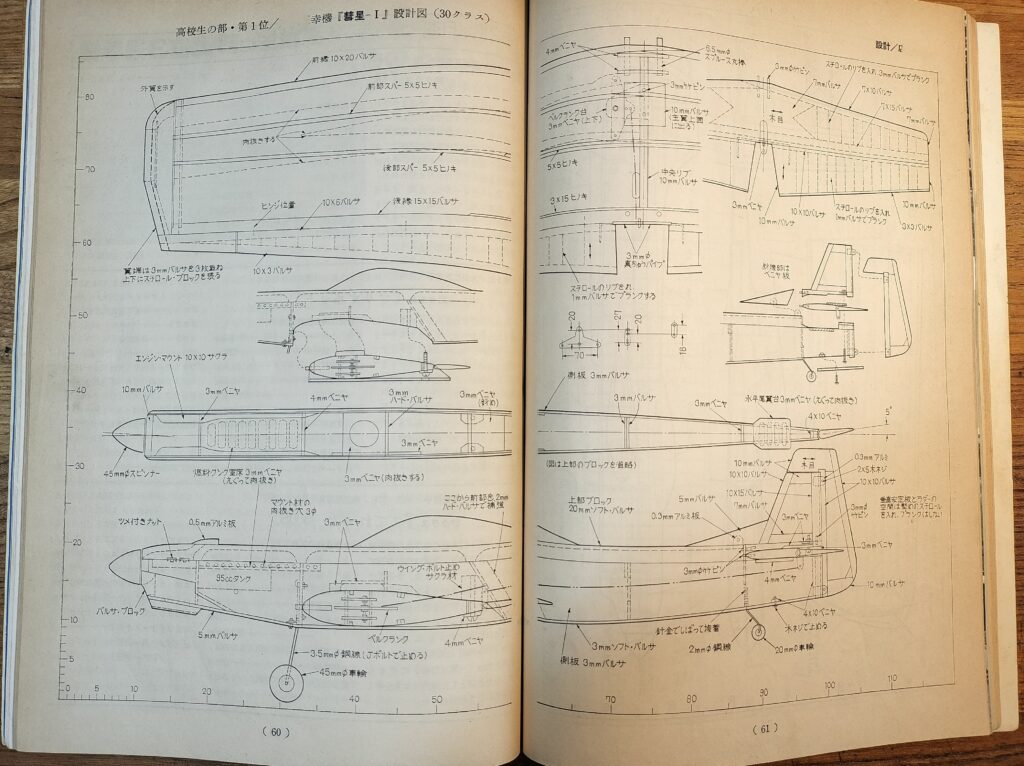
当時、車を使えない少年が機体を持って遠征する場合、むき出しで電車の網棚に載せて運んだものですが、本機は分解して箱詰めする仕様になっています。図面を見返すと特殊な構造が多く「新機軸全部載せ」の設計です。単に移動を楽にするだけでなく、人がやらない仕組みで目立ちたいという魂胆があったのでしょう。
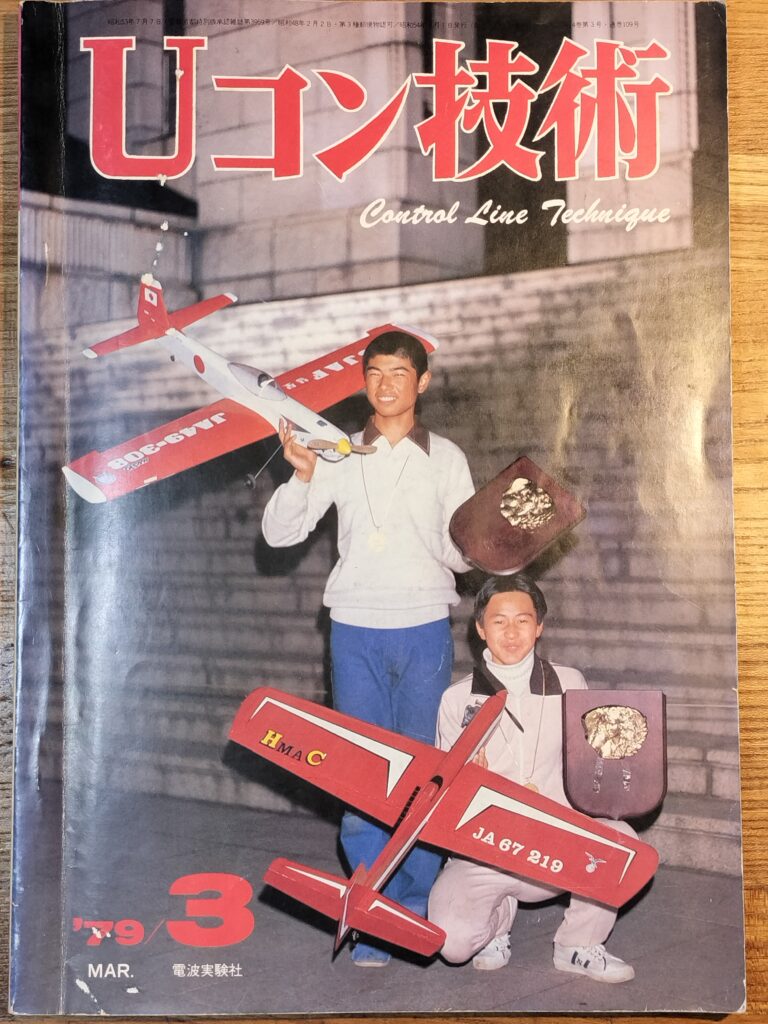
表紙の写真は大会当日のものですが、フラップとエレベーターがだらしなく垂れ下がっています。撤収して箱詰めした機体を撮影のために組み直した際、胴体内のリンケージをつなぎ忘れていたのです。普通の一体構造では起こり得ない、この機体特有のエラーですね。
大学時代、模型飛行機への熱量はいったん収まりましたが、学園祭で海洋浮体構造物の自動制御の実演をすることになりました。プールに浮かべた構造物の模型をカメラで追いながら、スクリューの向きと回転数をフィードバック制御して正しい位置に導くというデモンストレーションです。
製作したのは、浮体構造模型、スクリュー駆動機構、駆動モーターアンプ、ステッピングモータードライバー、制御用コンピューター、仮設プール、カメラ設置台等々、の複合体であります。全体計画/メカの設計製作は自分がやり、構造物模型の製作、駆動回路の設計製作、仮設プールの設計製作、制御用パソコンのプログラミング、そして予算/進捗管理・渉外マネージャーを、有志を募って手分けして実行しました。きつい日程でたいへんでしたが、大規模で精緻なメカがコンピュータと電子回路によって意図通りに動き出す、まさにメカに命を吹き込むような「メカトロニクス」の面白さに目覚めたプロジェクトでした。
同時に、一人で模型飛行機を作るのとは全く違う、チームワークでプロジェクトを成し遂げる素晴らしさも体験することができました。
大学を卒業して機械メーカーに就職すると、情熱はラジコンヘリに向かいました。1990年代初頭、本業の傍ら、たまたま近所にラジコンヘリを開発している会社を見つけたのです。そこで仲間に入れてくれと頼みこみ、振動ジャイロを用いたラジコンヘリの安定化技術の開発に没頭しました。振動ジャイロを積んだヘリを世界で初めて飛ばしたのは良い経験でした。
振動ジャイロを研究する過程で考案・開発したのが、「初代ムラタセイサク君」1として知られる、これも世界初のアクティブな自立制御で走る自転車ロボットです。
セイサク君の開発は難航しました。走り出してすぐに倒れる実機を前に、思いつく限りの工夫をこらしたプログラムを書き込んでは、数ヶ月もの試行錯誤を繰り返す日々。結局、安定化の決め手となったのは、高度な現代制御理論ではありませんでした。「演算を高速化して応答を速める」という、制御工学の「イロハのイ」に立ち返ることだったのです。
基本に忠実なプログラミングによって、セイサク君が倒れずに走った感動は忘れられないものとなりました。
そして時が経ち、30余年前の情熱が再び沸き上がり、自転車ロボットが持つ「元来不安定なものを制御で安定化する面白さ」や「教育的価値」を多くの方と共有したいと考えるようになりました。
現在は個人のプロジェクトとして、技術の普及と次世代への継承を目的に活動しています。
技術的な質問や、実費配布(研究・教育用)のご相談など、お問い合わせフォームからぜひお気軽にお声がけください。
- ムラタセイサク君は、(株)村田製作所の登録商標です。
初代と2代目以降は動作原理、開発者が異なります。 ↩︎